|
Email / CV / Google Scholar / Youtube / Github Latest Releases
About Me
|
|
|
|
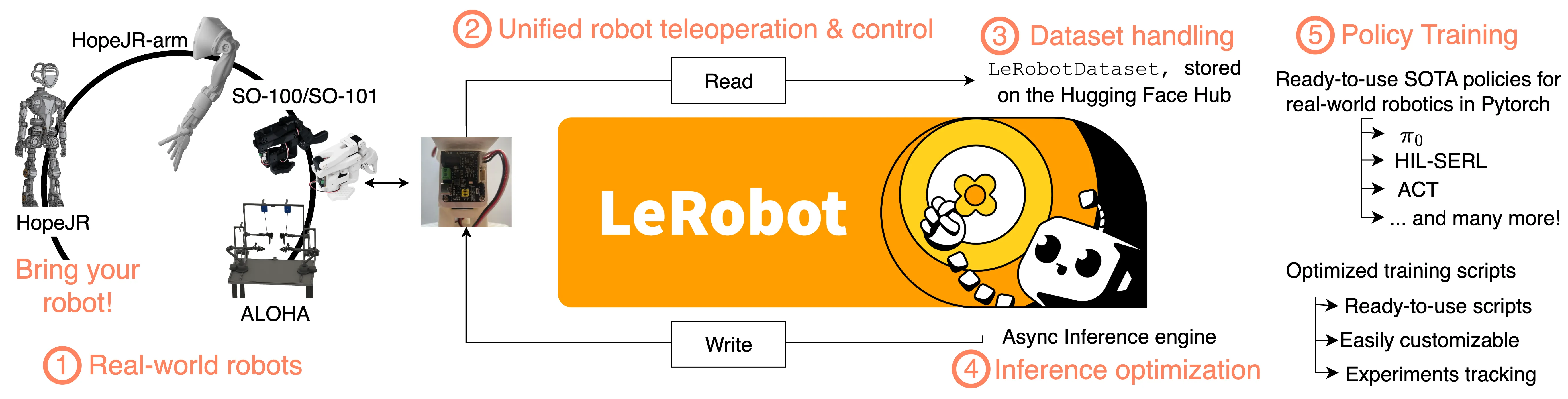
Remi Cadene, Simon Alibert, Francesco Capuano, Michel Aractingi, Adil Zouitine, Pepijn Kooijmans, et al. ICLR, 2026 paper bibtex An open-source library for end-to-end robot learning, spanning robot control, datasets, streaming, and learning algorithms for real-world robotics. |
|
Francesco Capuano, Caroline Pascal, Adil Zouitine, Thomas Wolf, Michel Aractingi arXiv, 2025 paper bibtex A tutorial covering modern robot learning, from reinforcement learning and behavioral cloning to generalist language-conditioned robot policies. |
|
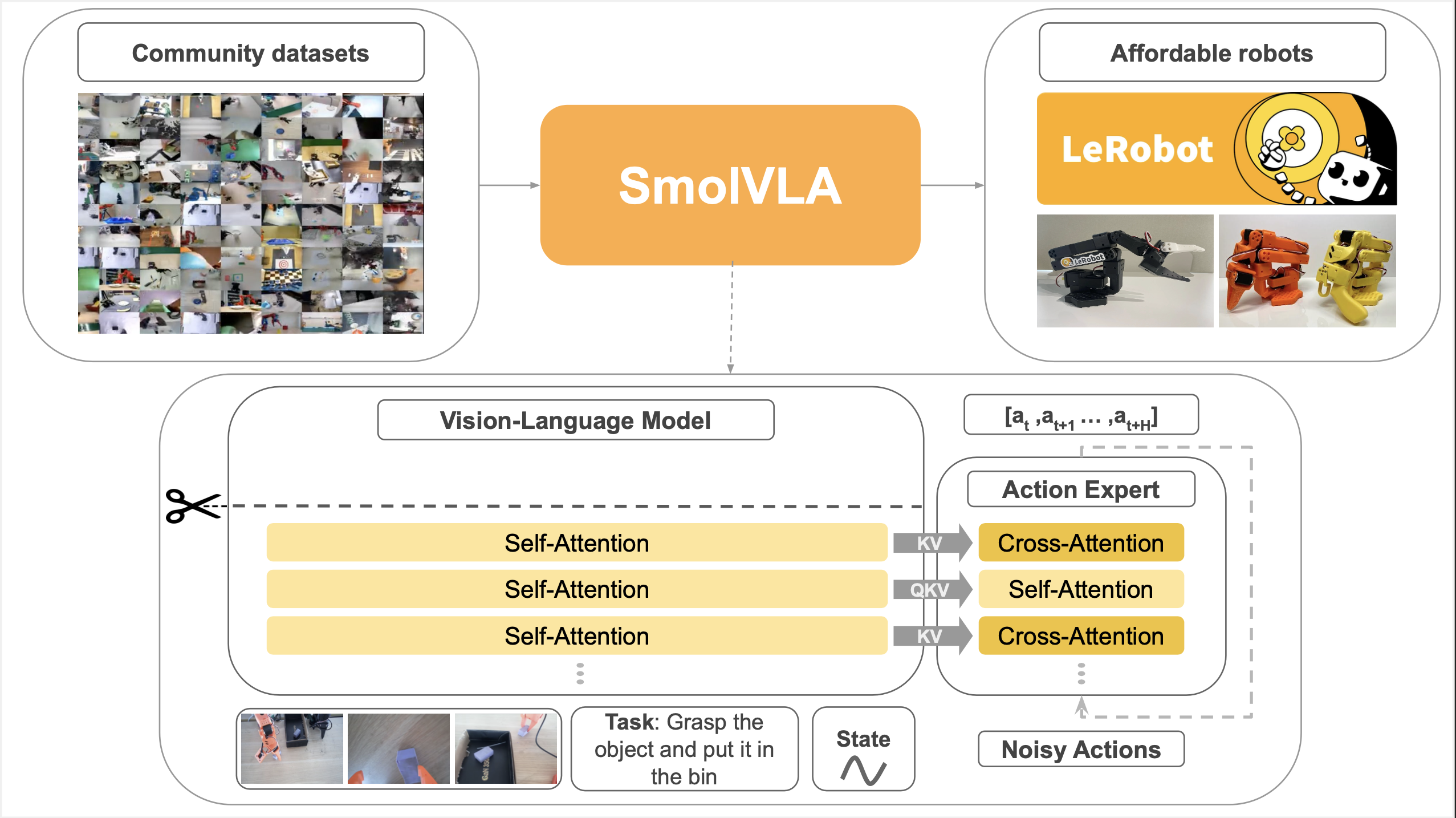
Mustafa Shukor, Dana Aubakirova, Francesco Capuano, Pepijn Kooijmans, Steven Palma, Adil Zouitine, Michel Aractingi, et al. arXiv, 2025 paper bibtex A small, efficient, community-driven vision-language-action model for affordable robotic platforms. |
|
Michel Aractingi, Pierre-Alexandre Leziart, Thomas Flayols, Julien Perez, Tomi Silander, Philippe Soueres IEEE Humanoids, 2023 paper bibtex video A hierarchical approach for learning locomotion policies where several aspects of the low-level behaviour can be comanded. |
|
Michel Aractingi, Pierre-Alexandre Leziart, Thomas Flayols, Julien Perez, Tomi Silander, Philippe Soueres Scientific Reports, 2023 paper bibtex video A deep reinforcement learning approach to learn joint-angle control for the solo12 quadruped with a state estimation network. |
|
Gianluca Monaci Michel Aractingi, Tomi Silander, RSS 2022, Nominated for Best Paper Award paper bibtex video Learning navigation policies in densely crowded environments. |
|
Michel Aractingi, Pierre-Alexandre Leziart, Thomas Flayols, Julien Perez, Tomi Silander, Philippe Soueres Preprint, 2021 paper bibtex We propose to augment the model-based controller of the solo12 quadruped with a policy that modifies the gait sequence learned with deep reinforcement learning. |
|
Michel Aractingi, Christopher Dance, Julien Perez, Tomi Silander, ICML 2019 Workshop RL4RealLife paper bibtex We study the generalization ability of visual navigation agents trained with deep RL. We propose a regularization term to improve their generalization ability. |
|
website's template credit goes to Jon Barron |